1. Halbjahr: Grundlagen & einfache Projekte
Monat 1: Einführung
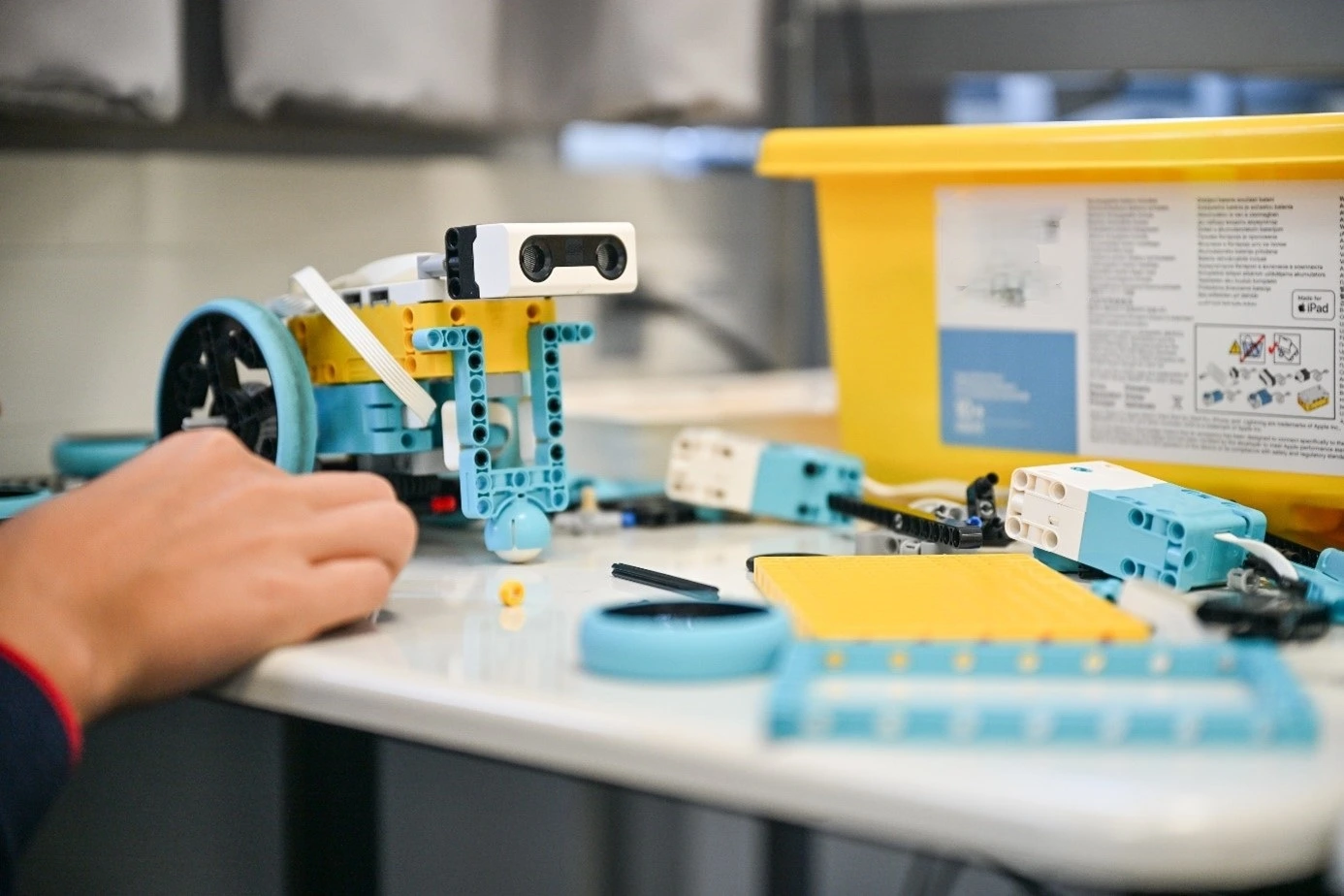
• Vorstellung des LEGO Spike Sets (Bauteile, Motoren, Sensoren)
• Erste einfache Bauübungen (z. B. ein Auto ohne Motor, Türme, Brücken)
• Einführung in die Programmierumgebung (z. B. herstellerspezifische Apps, Blockprogrammierung am PC im Browser)
• Erste Programmierübung: LEDs ein- und ausschalten
Monat 2: Bewegung & Motorsteuerung
• Bau einfacher Fahrzeuge mit Motor
• Grundlagen der Motorsteuerung (vorwärts/rückwärts, verschiedene Geschwindigkeiten)
• Steuerung des Motors per Knopfdruck
Monat 3: Sensoren kennenlernen
• Nutzung des Farbsensors (z. B. Farberkennung für Ampel)
• Nutzung des Abstandssensors (z. B. Hindernisse erkennen)
• Kleines Projekt: Ein Auto, das Hindernissen ausweicht
Monat 4: Kreative Projekte mit einfachen Algorithmen
• Einfache wiederholende Abläufe programmieren (Schleifen)
• „Zeichnender Roboter” mit Motorsteuerung
• Mini-Spiel: Farbensensor gesteuert (z. B. Stoppsignal bei roter Farbe)
Monat 5: Interaktive Modelle
• Bau eines einfachen Tieres (z. B. Vogel mit beweglichen Flügeln)
• Nutzung von Sensoren, um Bewegungen auszulösen
• Einführung in Bedingungen (Wenn-Dann-Strukturen)
Monat 6: Erste eigene Ideen
• Kinder entwickeln eigene einfache Projekte mit den gelernten Funktionen
• Vorstellung der Projekte in der Klasse
2. Halbjahr: Vertiefung & größere Projekte
Monat 7: Mehrere Motoren & komplexere Steuerungen
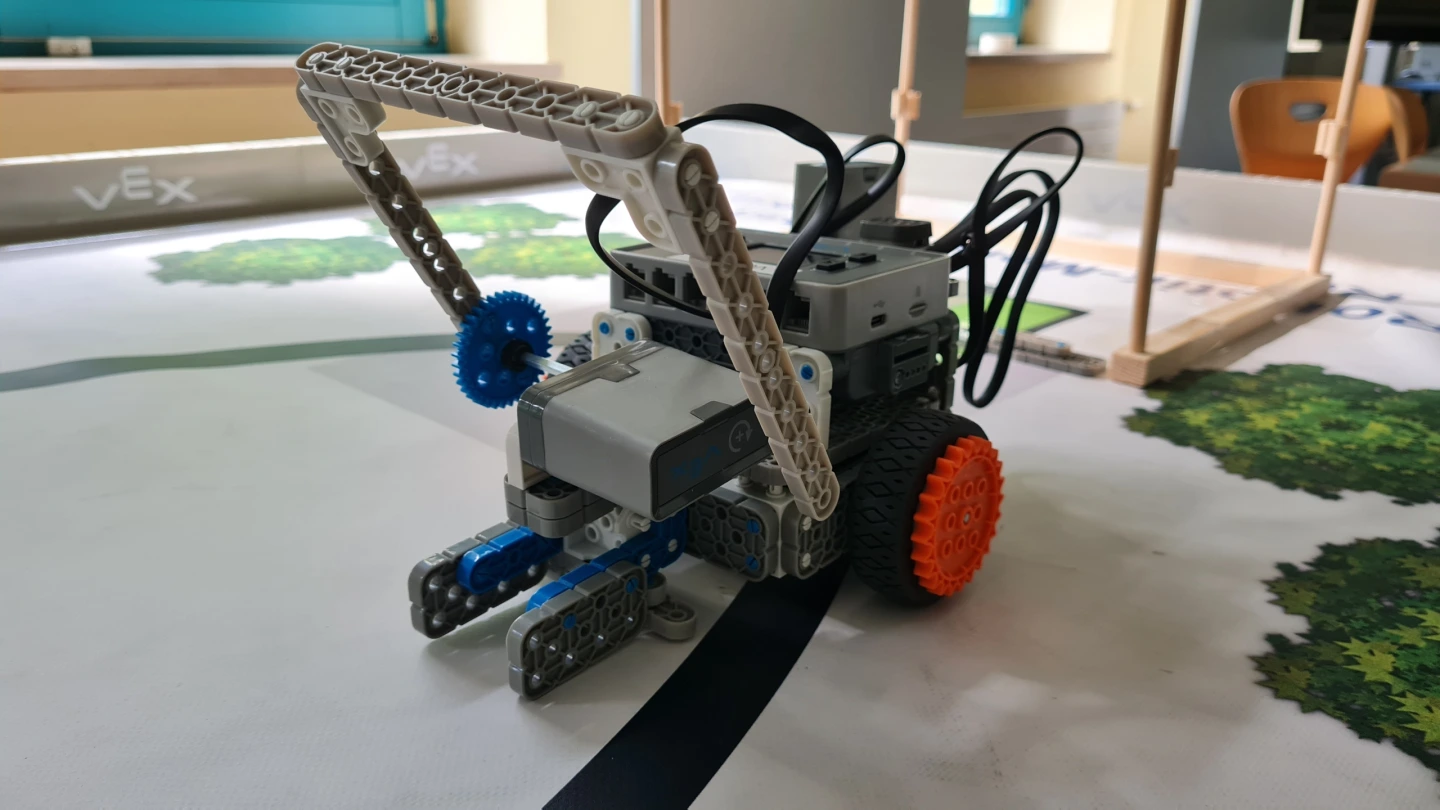
• Steuerung von zwei Motoren gleichzeitig (z. B. Greifarm)
• Kleine Maschinen bauen (z. B. ein Förderband)
Monat 8: Spiel & Storytelling
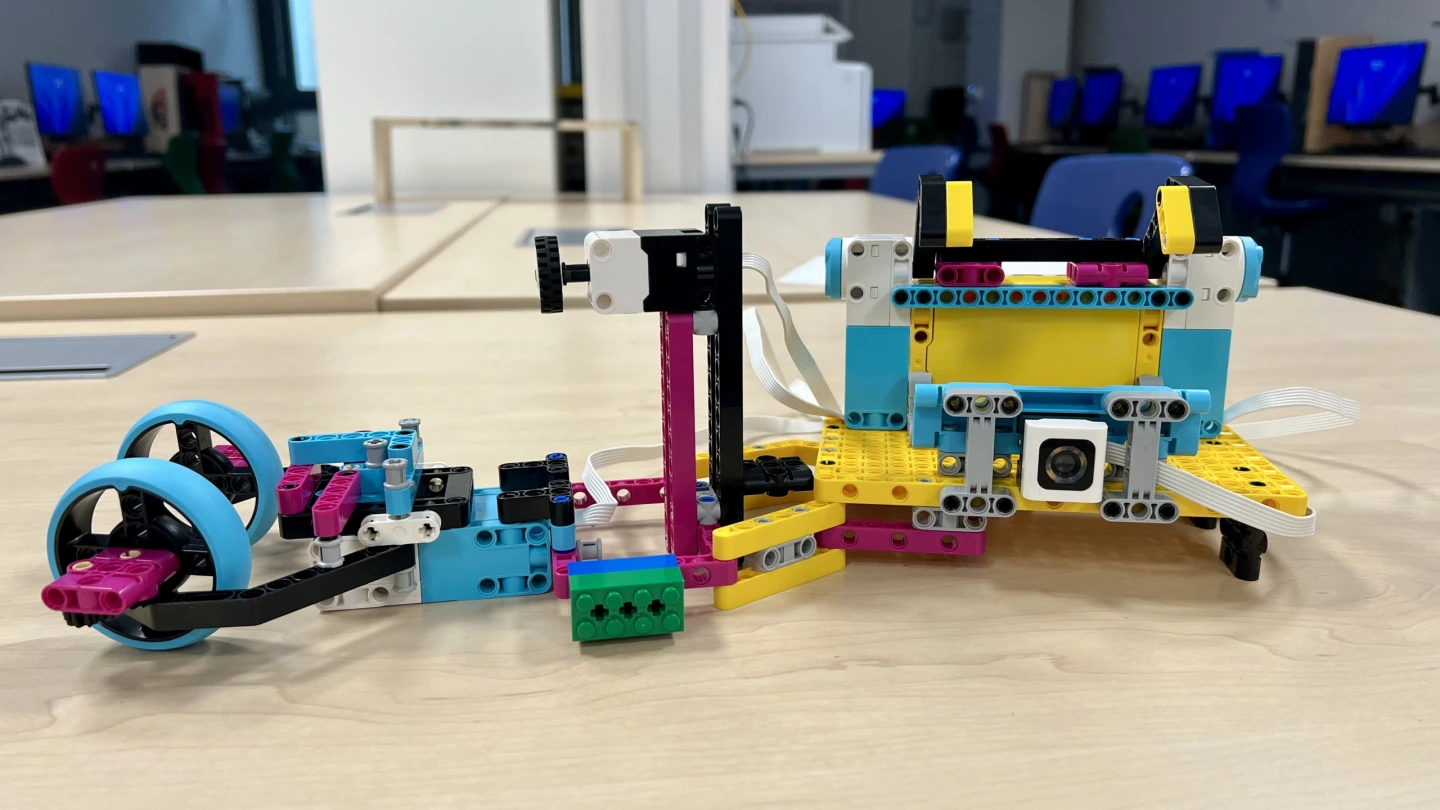
• Bau eines Charakters (z. B. Roboter mit Augen)
• Programmierung von Reaktionen (Bewegung + Ton)
• Storytelling: Der Roboter erzählt eine Geschichte durch Bewegung & Geräusche
Monat 9: Kreative Herausforderungen
• Escape-Room-Roboter (z. B. Tür öffnet sich erst bei richtiger Farbfolge)
• Labyrinth-Fahrzeug mit Hinderniserkennung
Monat 10: Zusammenarbeit & Teamprojekte
• Gruppenarbeiten: Ein Team baut, ein anderes programmiert
• Mini-Wettbewerbe (z. B. wer baut das schnellste Fahrzeug?) ggf.
• Offene Projektphase: Jedes Kind überlegt sich eine eigene Idee und setzt sie um
• Lehrende helfen bei der Umsetzung
Monat 11/12: Präsentation & Reflexion
• Vorstellung der Projekte
• Austausch: Was war leicht, was war schwer?
• Reflexion über das Gelernte
• Ausblick: Wie könnte man Roboter noch nutzen?
Didaktische Hinweise
• Differenzierung: Anpassen der Aufgaben an das Lernniveau der Kinder
• Haptischer Fokus: Mehr Bauen als Programmieren für Jüngere und schwächere Lernende
• Spaß im Vordergrund: Spielerische Elemente und Wettbewerbe einbauen
• Bewegung einbeziehen: Roboter interaktiv steuern lassen (Fernbedienung, Fernsteuerung über App)